@MinDoc(copyright="Copyright 2021 A. Weinert", version="V.65", lastModified="3.06.2024", usage="start as Java application (-? for help)", purpose="a Frame4J program to test IO devices on a Pi via pigpioD") public class TestOnPi extends App implements PiUtil, TestOnPiMBean
-input select input gpio or pin (prefix P) and optional pull resistor
settings (postfix U D or N); P0 means no input
-output dto. for (non LED) output operations
-ON -OFF set selected (non LED) output ON respectively OFF
-val -v set (by next parameter) dutycycle 0..255 or servo pulse
width 0:off; 500 ..1500:middle.. 2500:clockwise for the output
-wait -w wait for about 1 second
-help help output. See for further command line options and more.
java de.weAut.TestOnPi -help
java TestOnPi -?
java TestOnPi -help -de
java TestOnPi -en -help
java TestOnPi -blink -south
java TestOnPi -west -east -blink 192.168.178.67
java TestOnPi raspi67 -north -blink -cycLim 3122
java TestOnPi -outPort 3 -winkServo -de -cycLim 89012
weinert-automation.de a-weinert.de
/ / /\
/ /___ / \ |
\ /____\ /____\ | _|__
\ /\ / \ / \| |
\/ \/ \__/ \__/|_
BlinkOnPi,
TestOnPiMBean,
PiUtil,
TestOnPi.properties,
Raspi4testPinsPiUtil.Impl, PiUtil.LeTick| Modifier and Type | Field and Description |
|---|---|
int[] |
ledGNpins
The LEDs to blink.
|
int[] |
ledRDpins
The LEDs to blink.
|
int[] |
ledYEpins
The LEDs to blink.
|
ThePi.Port |
portIn
The input or button.
|
ThePi.Port |
portOut
The GPIO respectively pin to use for (single / non LED) operations.
|
ano, appBase, appIO, appStartTime, appStartTimeMS, args, argsOrig, bgColor, err, fullClassName, help, icon, log, mainThread, myClass, myFrame, name, out, outMode, packName, prop, retCode, runFlag, shortClassName, title, verbose, verbosityERR_ASSIGN_PIN, ERR_CLOSE_WDOG, ERR_NoGPIOLOCK, ERR_NoLOCKFILE, ERR_NoLOCKPROC, ERR_NOT_LOCKED, ERR_OPEN_W_DOG, ERR_PIGPIOD_CON, lckPiGpioPth, lckWinGpioPthGPIO_INP, GPIO_OUT, GPIOmax, GPIOmin, GPIOutM, H1, HI, L0, LO, PI_PUD_DOWN, PI_PUD_DT, PI_PUD_KP, PI_PUD_OFF, PI_PUD_UP, PIN0, PIN00, PIN01, PIN02, PIN04, PIN06, PIN09, PIN0V, PIN1, PIN14, PIN17, PIN2, PIN20, PIN25, PIN3V, PIN4, PIN5V, PIN6, PIN9, PINig, PINix, PIO_ALT0, PIO_ALT1, PIO_ALT2, PIO_ALT3, PIO_ALT4, PIO_ALT5AUTHOR, BLANK_STRING, cons, CONSOL_ENCODING, COPYRIGHT, D, D_NaN, D_NegInf, D_PosInf, EMPTY_INT_A, EMPTY_STRING, FILE_ENCODING, FRW_CLLD, FS, FSS, H, hasCons, HOST_IP, HOST_IPv4, HOST_NAME, INIT_ERROR, JAR_ENCODING, JH, JOB_DONE_OK, JRL, LOG_OUT_ERROR, M, MAIN_THREAD_EXC, NO_BYTES, NO_CLASSES, NO_DOUBLES, NO_OBJECTS, NO_PARS_ERROR, NO_STRINGS, NOT_WINDOWS, ON_PI, ONE_DAY, ONE_HOUR, ONE_LEAP_YEAR, ONE_MINUTE, ONE_SECOND, ONE_WEEK, ONE_YEAR, OS, PROG_NAME, PROG_SHORT, PS, RUNTIME, S, SHY, UD, UL, UL_UR_da, URILLEGAL_TYPE, ILLEGAL_VALUE, NO_ATTRIBUTE, NO_KNOWN_ATTRIBUTE, NO_VALUE, OK, retVtext| Constructor and Description |
|---|
TestOnPi() |
| Modifier and Type | Method and Description |
|---|---|
void |
blink()
Blink the LEDs.
|
int |
doIt()
The application's work.
|
Integer |
getCycCount()
The number of cycles.
|
Integer |
getCycLim()
The limit for the number of cycles.
|
Integer |
getCycOvr()
Get the number of spoiled delays.
|
String |
getInPort()
Get the port for input actions.
|
Boolean |
getLEDgn()
The state of the green LED(s).
|
Boolean |
getLEDrd()
The state of the red LED(s).
|
Boolean |
getLEDye()
The state of the yellow LED(s).
|
String |
getOutPort()
Get the output for (non LED) actions.
|
String |
getOutput()
The state of the output.
|
Integer |
getPiType()
Get the Pi type.
|
Integer |
getStepDelay()
Get delay / ms between two operations.
|
Integer |
getStepVal()
Get step between two PMW or servo values.
|
Integer |
getVal()
Get PMW or servo current value.
|
Integer |
getValLo()
Get PMW or servo value lower limit.
|
Integer |
getValUp()
Get PMW or servo value upper limit.
|
Boolean |
input()
Just input.
|
Boolean |
inToInvOut()
Input and set the output with the inverted result.
|
static void |
main(String[] args)
The application start.
|
boolean |
parsePartial()
Partial evaluation of start parameters by Prop.
|
void |
setCycCount(Integer cycCount)
Set the number of cycles.
|
void |
setCycLim(int cycLim) |
void |
setCycLim(Integer cycLim)
Set the limit for number of cycles.
|
void |
setInPort(String inPort)
Set the input for input actions.
|
void |
setLedGNpin(int index,
int pin)
Indexed property ledGNpin[], setter.
|
void |
setLedRDpin(int index,
int pin)
Indexed property ledRDpin[], setter.
|
void |
setLedYEpin(int index,
int pin)
Indexed property ledYEpin[], setter.
|
void |
setOutPort(String outPort)
Set the output for (non LED) actions.
|
void |
setOutput(String out)
Set the output.
|
void |
setStepDelay(int delay) |
void |
setStepDelay(Integer delay)
Set delay / ms between two operations.
|
void |
setStepVal(int stepVal) |
void |
setStepVal(Integer stepVal)
Set step between two PMW or servo values.
|
void |
setVal(int val) |
void |
setVal(Integer val)
Set PMW or servo current value.
|
void |
setValLo(int valLo) |
void |
setValLo(Integer valLo)
Set PMW or servo value lower limit.
|
void |
setValUp(int valUp) |
void |
setValUp(Integer valUp)
Set PMW or servo value upper limit.
|
void |
stopTask()
Stop the task.
|
void |
wink()
Servo wink respectively PWM up/down.
|
void |
winkPWM()
PWM continuously up and down over almost full range.
|
void |
winkServo()
Wink servo over almost full range.
|
actionPerformed, allowNoPropertiesFile, clientOrder, condHelpLog, connect, errMeld, errMeld, errorExit, errorExit, errorText, extraPropertiesFile, formMessage, formMessage, formMessage, getAbout, getAboutText, getActTime, getAppLogger, getAppStartTime, getArgs, getAuthor, getCopyright, getDbLogger, getExecTimeMs, getExecTimeMsL, getExecTimeString, getHelp, getHelpText, getIcon, getLanguage, getLogHandler, getMessageComponent, getMessageComponentsLength, getMyFrame, getName, getNameWithVersDate, getOutMode, getProp, getPurpose, getStartTime, getStateString, getTheCloser, getTitle, getUsage, getVerbose, getVerbosity, getVersDate, go, go, go, haveIcon, isDebug, isHelp, isHelpLog, isNormal, isRunFlag, isSilent, isTest, isVerbose, logVerbose, logVerbose, makeStatusTextEnd, makeStatusTextStart, messageFormat, normalExit, performeAction, queueAction, regAsStdMBean, repExc, setAboutText, setAttribute, setAttribute, setAuthor, setBgColor, setCodePages, setCopyright, setHelp, setLogOut2, setName, setOutMode, setOutMode, setPurpose, setTitle, setUsage, setVerbose, setVerbose, setVerbosity, setVerbosity, setVersDate, stop, threeLineEndMsg, toString, twoLineEndMsg, twoLineStartMsg, valueLang, valueLang, wakeMainThreadclone, equals, finalize, getClass, hashCode, notify, notifyAll, wait, wait, waitargHost, argPiType, argPort, argTimeout, closeLock, closeWatchdog, eightDigitHex, errorText, getDelCnt, getLastExcept, getLastExcMess, getLastLockFN, getOut, getOvrCnt, getUseLock, openLock, openLockPi, openWatchdog, regAsStdMBean, repExc, setArgHost, setArgPiType, setArgPort, setArgTimeout, setUseLock, systemExit, thrDelay, triggerWatchdog, twoDigitDecgetActTime, getArgs, getCopyright, getExecTimeMsL, getLanguage, getName, getPurpose, getStartTime, getVerbose, getVersDate, stopretVtextpublic int[] ledRDpins
public int[] ledYEpins
public int[] ledGNpins
public ThePi.Port portIn
PINig resp. 0 : ignore no operation
and PI_PUD_KP : keep pull up/down/none as ispublic ThePi.Port portOut
PINig resp. 0 : ignore no operation
and PI_PUD_KP : keep pull up/down/none as ispublic final boolean parsePartial()
AppProp object shall
evaluate and check the start parameters (see App.args) only
partially. For the meaning of "partial evaluation" please see
Prop#parse(String[],CharSequence,boolean)
Prop.parse(String[], CharSequence, boolean).Prop is a
fixed property of an application classes extending App must override this
method finally this methods default behaviour is not wanted.parsePartial in class AppApp(String[])public void setLedRDpin(int index,
int pin)
public void setLedYEpin(int index,
int pin)
public void setLedGNpin(int index,
int pin)
public final void setStepVal(int stepVal)
public final void setCycLim(int cycLim)
public final void setValUp(int valUp)
public void setValLo(int valLo)
public final void setStepDelay(int delay)
public void setVal(int val)
public final Integer getCycCount()
TestOnPiMBeangetCycCount in interface TestOnPiMBeanTestOnPiMBean.setCycCount(Integer),
TestOnPiMBean.getCycOvr()public void setCycCount(Integer cycCount)
TestOnPiMBeansetCycCount in interface TestOnPiMBeanpublic final Integer getCycOvr()
TestOnPiMBeangetCycOvr in interface TestOnPiMBeanPiUtil.thrDelay(int),
TestOnPiMBean.getCycCount()public final Integer getCycLim()
TestOnPiMBeansetCycCount(0), if any, or the
application will stop.getCycLim in interface TestOnPiMBeanTestOnPiMBean.setCycLim(Integer),
TestOnPiMBean.getCycCount()public void setCycLim(Integer cycLim)
TestOnPiMBeancycLim and, also,
resets the number of cycles to 0.setCycLim in interface TestOnPiMBeancycLim - the limit; 0 effectively means endlesspublic Boolean getLEDye()
TestOnPiMBeangetLEDye in interface TestOnPiMBeanpublic Boolean getLEDgn()
TestOnPiMBeangetLEDgn in interface TestOnPiMBeanpublic Boolean getLEDrd()
TestOnPiMBeangetLEDrd in interface TestOnPiMBeanpublic Integer getPiType()
TestOnPiMBeangetPiType in interface TestOnPiMBeanpublic final void setStepDelay(Integer delay)
TestOnPiMBeansetStepDelay in interface TestOnPiMBeandelay - 2 .. 29999 ms; default 10 mspublic final Integer getStepDelay()
TestOnPiMBeangetStepDelay in interface TestOnPiMBeanpublic final void setStepVal(Integer stepVal)
TestOnPiMBeansetStepVal in interface TestOnPiMBeanstepVal - the value will be adjusted at use if not fittingpublic final Integer getStepVal()
TestOnPiMBeangetStepVal in interface TestOnPiMBeanpublic void setVal(Integer val)
TestOnPiMBeansetVal in interface TestOnPiMBeanval - the value will be adjusted at use if not fittingpublic Integer getVal()
TestOnPiMBeangetVal in interface TestOnPiMBeanpublic void setValUp(Integer valUp)
TestOnPiMBeansetValUp in interface TestOnPiMBeanvalUp - the limit will be adjusted at use if not fittingpublic Integer getValUp()
TestOnPiMBeangetValUp in interface TestOnPiMBeanpublic void setValLo(Integer valLo)
TestOnPiMBeansetValLo in interface TestOnPiMBeanvalLo - the limit will be adjusted at use if not fittingpublic Integer getValLo()
TestOnPiMBeangetValLo in interface TestOnPiMBeanpublic void stopTask()
TestOnPiMBeanTestOnPiMBean.blink() or
TestOnPiMBean.wink() etc.) if any is running. This will start the next task
pending. Otherwise it will act like App.stop().stopTask in interface TestOnPiMBeanpublic void setOutPort(String outPort)
setOutPort in interface TestOnPiMBeanoutPort - output pin (12N, e.g.) or gpio (with leading G; G18, e.g.)TestOnPiMBean.getOutPort(),
TestOnPiMBean.getInPort(),
TestOnPiMBean.setInPort(String)public void setInPort(String inPort)
setInPort in interface TestOnPiMBeaninPort - input pin (7, e.g.) or gpio (with leading G; G4U, e.g.)TestOnPiMBean.getInPort(),
TestOnPiMBean.setOutPort(String),
TestOnPiMBean.getOutPort()public String getOutPort()
TestOnPiMBean"07UG04". TestOnPiMBean.setOutPort(String); for the example
setOutPort("7U") would be sufficient.getOutPort in interface TestOnPiMBeanTestOnPiMBean.setOutPort(String),
TestOnPiMBean.getInPort(),
TestOnPiMBean.setInPort(String)public String getInPort()
TestOnPiMBeangetInPort in interface TestOnPiMBeanTestOnPiMBean.setInPort(String),
TestOnPiMBean.setOutPort(String),
TestOnPiMBean.getOutPort()public void blink()
blink in interface TestOnPiMBeanpublic void winkServo()
winkServo in interface TestOnPiMBeanpublic void winkPWM()
winkPWM in interface TestOnPiMBeanpublic void wink()
portOut allows no out nothing is done except a message.val determines the mode: wink in interface TestOnPiMBeanpublic void setOutput(String out)
TestOnPiMBeanString out as does
ClientPigpiod.setOutput(gpio, out)
usually by implementing it so.setOutput in interface TestOnPiMBeanout - the output valueClientPigpiod.setOutput(int, String)public Boolean inToInvOut()
TestOnPiMBeaninToInvOut in interface TestOnPiMBeanTestOnPiMBean.input(),
TestOnPiMBean.setOutput(String)public Boolean input()
TestOnPiMBean1/Hi
TRUE will be returned.input in interface TestOnPiMBeanTestOnPiMBean.inToInvOut()public String getOutput()
setOutput(value) or other actions.getOutput in interface TestOnPiMBeanpublic static void main(String[] args)
doIt()).
Can be stopped by signal (cntlC), kill command and the like, as well as
by an MBean client, like e.g. JConsole, by operation App.stop().
Run by java TestOnPi [host [port]] [-option [-option ....-north 29 31 33; -east 36 38 40; -south 11 13 15; -west 16 18 22;-LEDefault 11 22 13 -pi0 -pi1 -pi3 -pi4 (0, 1, 3 and 4 map to 3, the default)args - start parameters.public int doIt()
doIt in class AppProp,
App.go(String[]),
App.go(String[], String, CharSequence),
App.mainThread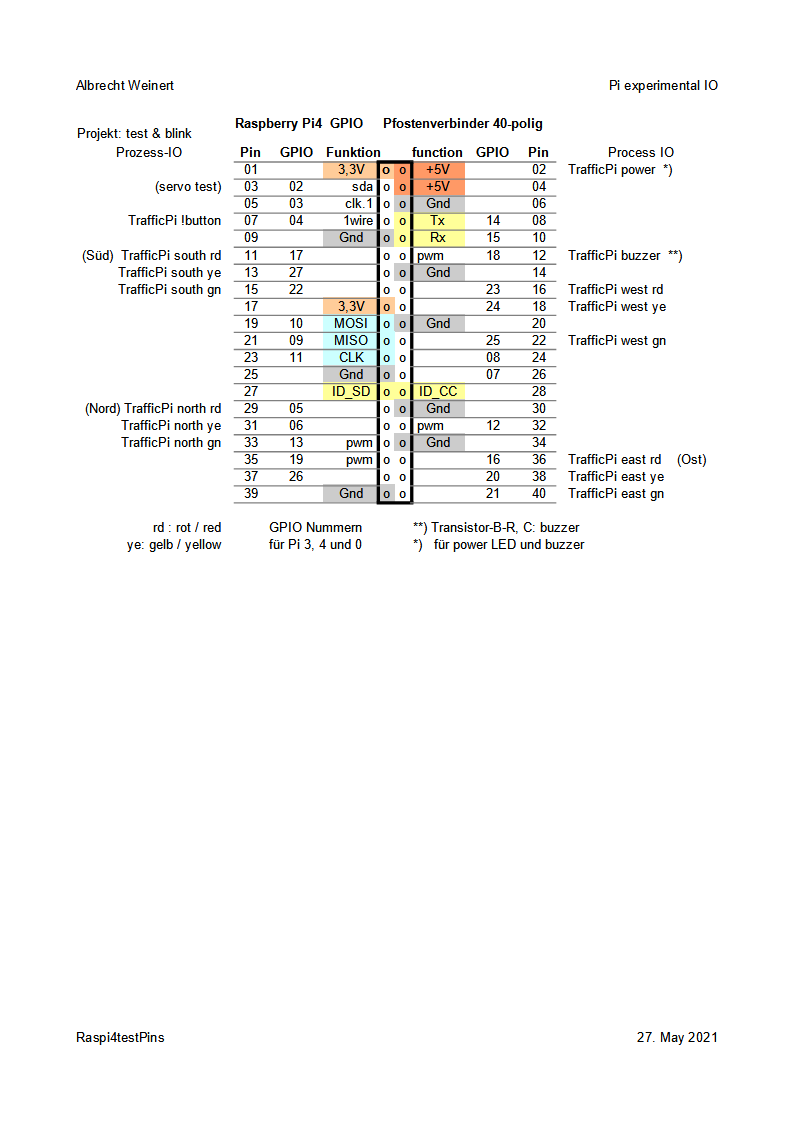{kind=link}