public interface TestOnPiMBean extends AppMBean
TestOnPi,
PiUtil,
BlinkOnPi,
TestOnPi.properties,
Raspi4testPins| Modifier and Type | Method and Description |
|---|---|
void |
blink()
Blink the LEDs.
|
Integer |
getCycCount()
The number of cycles.
|
Integer |
getCycLim()
The limit for the number of cycles.
|
Integer |
getCycOvr()
Get the number of spoiled delays.
|
String |
getInPort()
Get the port for input actions.
|
Boolean |
getLEDgn()
The state of the green LED(s).
|
Boolean |
getLEDrd()
The state of the red LED(s).
|
Boolean |
getLEDye()
The state of the yellow LED(s).
|
String |
getOutPort()
Get the output for (non LED) actions.
|
String |
getOutput()
The state of the output.
|
Integer |
getPiType()
Get the Pi type.
|
Integer |
getStepDelay()
Get delay / ms between two operations.
|
Integer |
getStepVal()
Get step between two PMW or servo values.
|
Integer |
getVal()
Get PMW or servo current value.
|
Integer |
getValLo()
Get PMW or servo value lower limit.
|
Integer |
getValUp()
Get PMW or servo value upper limit.
|
Boolean |
input()
Just input.
|
Boolean |
inToInvOut()
Input and set the output with the inverted result.
|
void |
setCycCount(Integer cycCount)
Set the number of cycles.
|
void |
setCycLim(Integer cycLim)
Set the limit for number of cycles.
|
void |
setInPort(String inPort)
Set the port for input actions.
|
void |
setOutPort(String outPort)
Set the output for (non LED) actions.
|
void |
setOutput(String out)
Set the output.
|
void |
setStepDelay(Integer delay)
Set delay / ms between two operations.
|
void |
setStepVal(Integer step)
Set step between two PMW or servo values.
|
void |
setVal(Integer val)
Set PMW or servo current value.
|
void |
setValLo(Integer valLo)
Set PMW or servo value lower limit.
|
void |
setValUp(Integer valUp)
Set PMW or servo value upper limit.
|
void |
stopTask()
Stop the task.
|
void |
wink()
Servo wink respectively PWM up/down.
|
void |
winkPWM()
PWM continuously up and down over almost full range.
|
void |
winkServo()
Wink servo over almost full range.
|
getActTime, getArgs, getCopyright, getExecTimeMsL, getLanguage, getName, getPurpose, getStartTime, getVerbose, getVersDate, stopBoolean getLEDye()
Boolean getLEDrd()
Boolean getLEDgn()
Integer getCycCount()
setCycCount(Integer),
getCycOvr()void setCycCount(Integer cycCount)
Integer getCycLim()
setCycCount(0), if any, or the
application will stop.setCycLim(Integer),
getCycCount()void setCycLim(Integer cycLim)
cycLim and, also,
resets the number of cycles to 0.cycLim - the limit; 0 effectively means endlessInteger getCycOvr()
PiUtil.thrDelay(int),
getCycCount()Integer getPiType()
void setOutPort(String outPort)
outPort - output pin (12N, e.g.) or gpio (with leading G; G18, e.g.)getOutPort(),
getInPort(),
setInPort(String)String getOutPort()
"07UG04". setOutPort(String); for the example
setOutPort("7U") would be sufficient.setOutPort(String),
getInPort(),
setInPort(String)void setInPort(String inPort)
inPort - input pin (7, e.g.) or gpio (with leading G; G4U, e.g.)getInPort(),
setOutPort(String),
getOutPort()String getInPort()
setInPort(String),
setOutPort(String),
getOutPort()void setStepDelay(Integer delay)
delay - 2 .. 29999 ms; default 10 msInteger getStepDelay()
void setStepVal(Integer step)
step - the value will be adjusted at use if not fittingInteger getStepVal()
void setVal(Integer val)
val - the value will be adjusted at use if not fittingInteger getVal()
void setValUp(Integer valUp)
valUp - the limit will be adjusted at use if not fittingInteger getValUp()
void setValLo(Integer valLo)
valLo - the limit will be adjusted at use if not fittingInteger getValLo()
void blink()
void wink()
void winkServo()
void winkPWM()
void setOutput(String out)
String out as does
ClientPigpiod.setOutput(gpio, out)
usually by implementing it so.out - the output valueClientPigpiod.setOutput(int, String)Boolean inToInvOut()
input(),
setOutput(String)Boolean input()
1/Hi
TRUE will be returned.inToInvOut()String getOutput()
setOutput(out),
of the output. This method returns the binary on/off state as well as the
numerical PMW or servo state as text.void stopTask()
blink() or
wink() etc.) if any is running. This will start the next task
pending. Otherwise it will act like App.stop().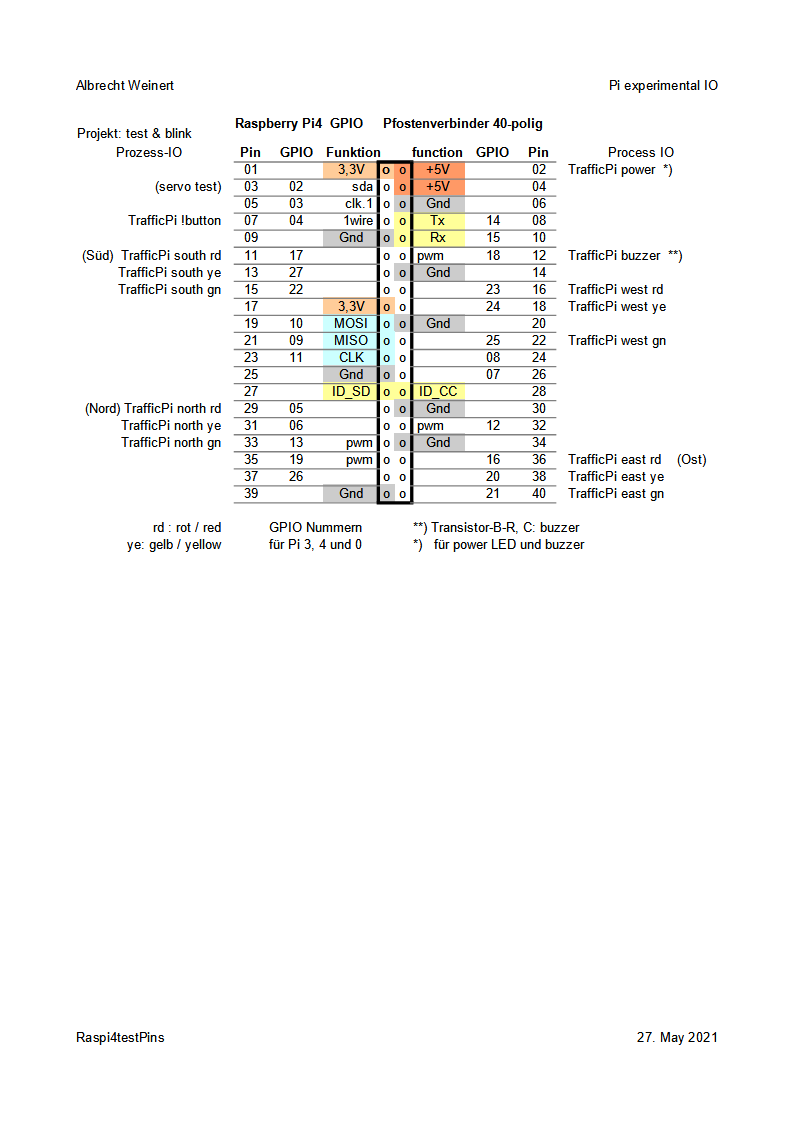{kind=link}